Advanced, Model-integrated, Offline and Real-time Visualization
|
Community Edition
|
Professional Edition
|
Viewer Edition
|
|---|
| Current Version | 1.5 | 1.5 | 1.5 |
| Content | |||
| DLR SimVis Viewer Software | |||
| Modelica Library | |||
| Features | |||
| Unlimited numbers of objects | max. 50 | ||
| Unlimited CAD file size for file shapes? | 2 MB | ||
| Flexible bodies | |||
| Flexible surfaces | without textures, 20x20 vertices | ||
| Unlimited Number of cameras? | Max. 1 | ||
| VR (support for HTC Vive) | |||
| Lights | |||
| Multi-window | |||
| Interactive graphical user interfaces (HUD) | |||
| Media and energy flow visualization | |||
| Special effects (particles, weather, ocean surface …) | |||
| Path definitions, labels, coordinate axes | |||
| Trace shape | |||
| Collision detector | |||
| Compatibility | |||
| Windows | |||
| Linux | only nodelocked | only nodelocked | |
| Dymola - SimVis Shapes | |||
| Dymola - Modelica MultiBody Shape (ModelicaServices) | |||
| OpenModelica - SimVis Shapes | experimental | experimental | experimental |
| OpenModelica - Modelica Shapes (ModelicaServices) | experimental | experimental | experimental |
| C API | |||
| Julia API | |||
| Access | |||
| Technical Support | Please ask for a quote | ||
| License | CC BY-ND 4.0 | Proprietary | Proprietary |
| Price | Free | 1.400 € | Please ask |
| Request DOWNLOAD (free of charge) | Request Download (for maintainance customers) | Request Download (for maintainance customers) | |
| Request Support Need help? Found bugs? | Request a Quote Want to upgrade? | Request a Quote Want to upgrade? | |
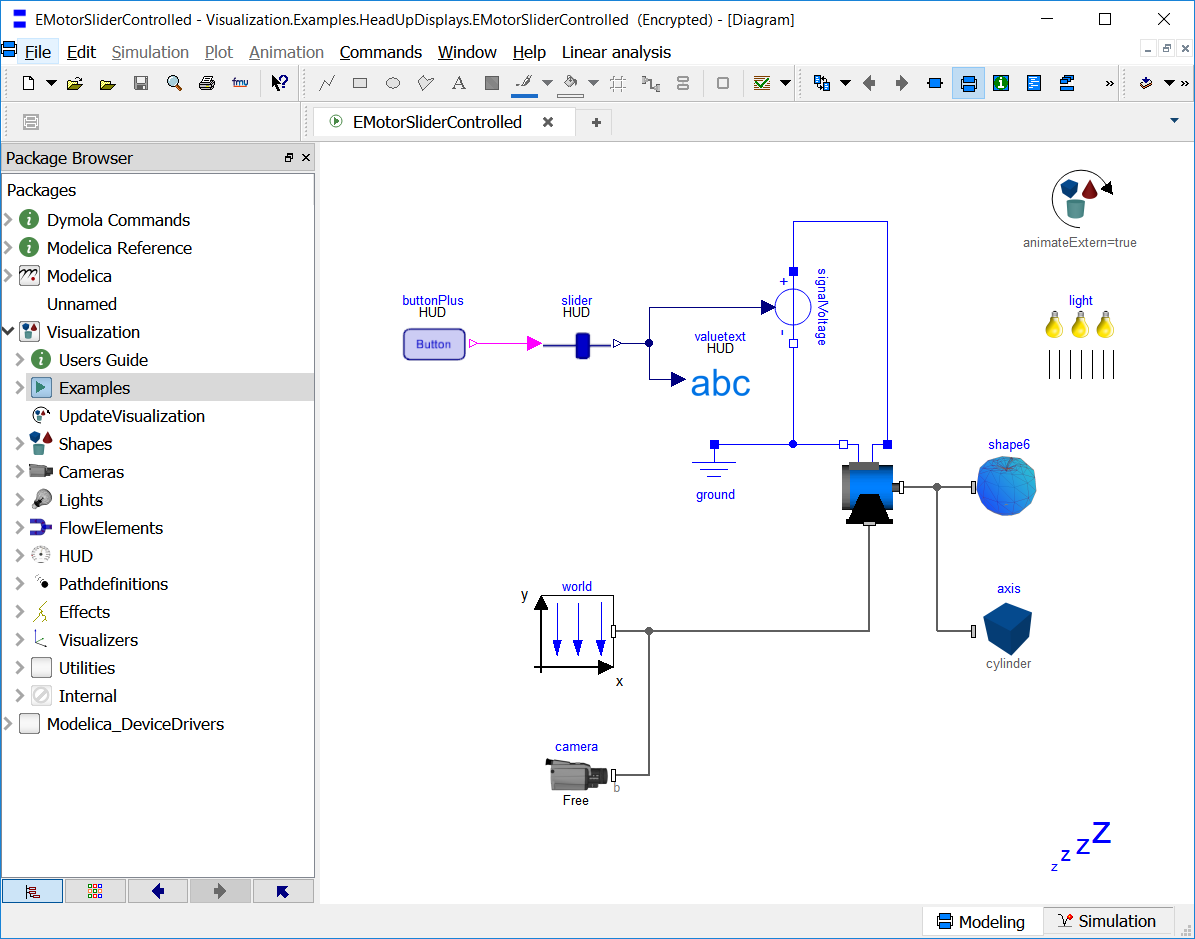
The Visualization Library provides an advanced, model-integrated and vendorunspecific visualization tool for Modelica models. It is especially useful in the mechanical, fluid and electrical area. Many components are available for offline, online and real-time animation. Most components are attached to a Modelica model with a Frame connector of the Modelica.Mechanics.MultiBody library.
The library contains visualizers for basic shapes, CAD files (.3ds, .obj, .dxf, .stl, .vrml and more),flexible bodies and surfaces, text, light, energy-/mass-flow visualizers, analogue instruments and weather effects. A camera system can be used to define the point of view manually or controlled by simulation.
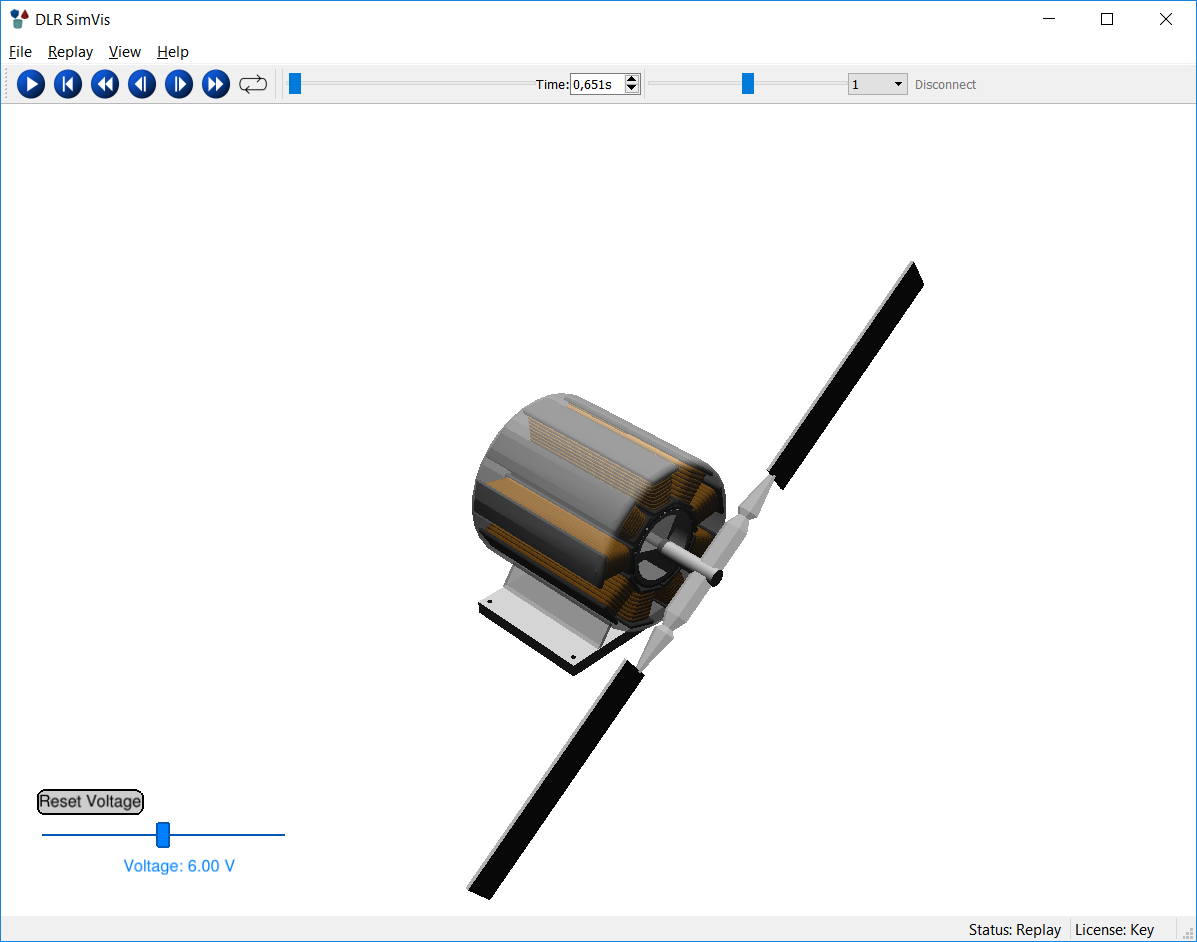
Components like Buttons, Checkboxes and Sliders are available for the creation of graphical user interfaces for the visualization software. These elements can be used to control the simulation interactively during the simulation run.
The components are visualized in an integrated system providing support for multi-camera scenes, a fullscreen mode, several monitors, replays and stereo/wireframe modes. It is based on the OpenSceneGraph framework.
The integrated video-export function allows the export of the animation replays as MPEG4, Windows Media Video, Flash Video and Lossless HUFF video.
The standard Modelica visualization for multi-body models can be replaced by this Visualization tool, if the Shape component in the ModelicaServices Library is replaced by the user.
More information and videos are available at the website of
DLR Systems & Control Innovation Lab